Velodyne Lidar と Unity のタッグが LIDAR シミュレーションを強化する





データ量は、LIDAR シミュレーションを行う時に直面する主な課題の 1 つです。ある大手 LIDAR ソリューションプロバイダーが、Unity の Sensor SDK、System Graph、および HD レンダーパイプライン(HDRP)を使用して、センサーの研究開発に必要なデータをシミュレートしています。このブログでは、Velodyne Lidar のマルチメディアコンテンツ開発者である Peter Desrosier 氏に、同社のアプローチについてお話ししてもらった内容を紹介します。
仮説を含んだシナリオで LIDAR を検証することの効用が、光検出および測距技術全体の進化と改善にとって重要になっています。ただし、LIDAR シミュレーションには、いくつかの課題と障害があります。
Velodyne Lidar は、自動運転車、ドライバー支援、配達ソリューション、ロボティクス、ナビゲーション、地図作成などにスマートで強力な LIDAR ソリューションを提供します。Velodyne の貢献により、LIDAR 技術の費用対効果はますます高くなっています。その結果、LIDAR の需要もますます高まっています。ただし、エンジニアリング開発プロセスには、費用と時間がかかることがあります。シミュレーションは、どのタイプのセンサーの開発を進める価値があるかを判断するためのデータを迅速に提供し、さまざまなシナリオでのさまざまなセンサーの長所と短所を強調することでエンジニアリングのプロセスをスピードアップし、実世界でテストを行うよりもはるかに高速なプロトタイピングを可能にします。仮想センサーと実際に生産するセンサーの両方を視覚化してテストする機能により、LIDAR 生産パイプライン全体を急速に整備できます。
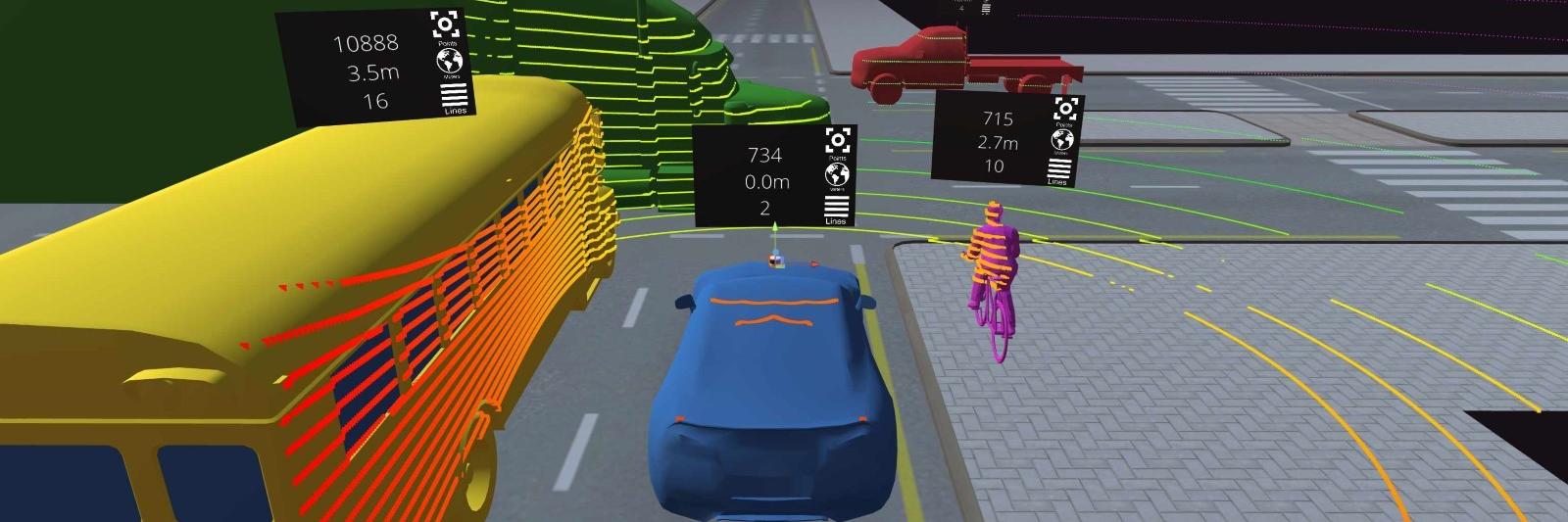
データの量は、LIDAR シミュレーションを行う際に直面する最も大きな課題の 1 つです。特に Velodyne のセンサーの場合、従来のシミュレーション方法でシーンを 1 回走査すると、シーン内に数百万の接触点が生じることがあります。たとえば、Alpha Prime™などの高解像度のマルチチャネル LIDAR の 1 回の走査をシミュレートすると、複雑な 3D 環境をエミュレートする場合は、強力なコンピューターでさえストレスを感じる可能性があります。ただし、ヒット数を決定し、レーザーの各チャネルを正確にシミュレートするプロセスでは、慎重な計算とキャリブレーションが必要です。
シミュレーションへの過去のアプローチでは、「ライトマスクプロジェクター」と呼ばれる方法などが取られていました。いずれの方法でも、基本的には Unity のライティングで LIDAR をエミュレートします。


このような手法の利点は、シナリオのプロトタイピングを非常に迅速に行い、視覚的に見せられることです。ただし、この手法を使用してオブジェクトのポイント数を決定する簡単な方法はありません。パーティクルベースのシステムなど、他のアプローチならこの問題に対処できます。基本的に、CPU ベースのパーティクルシステムは、ポイント、それらの衝突、およびセンサーのスキャンパターンをシミュレートするエミッターに依存しています。これにより、オブジェクトのポイント数を決定する問題が解決されますが、特に複数の解像度を持っているセンサーや高解像度のセンサーでは、衝突を検出するまで時間がかかり、メモリを大量に消費する可能性があります。



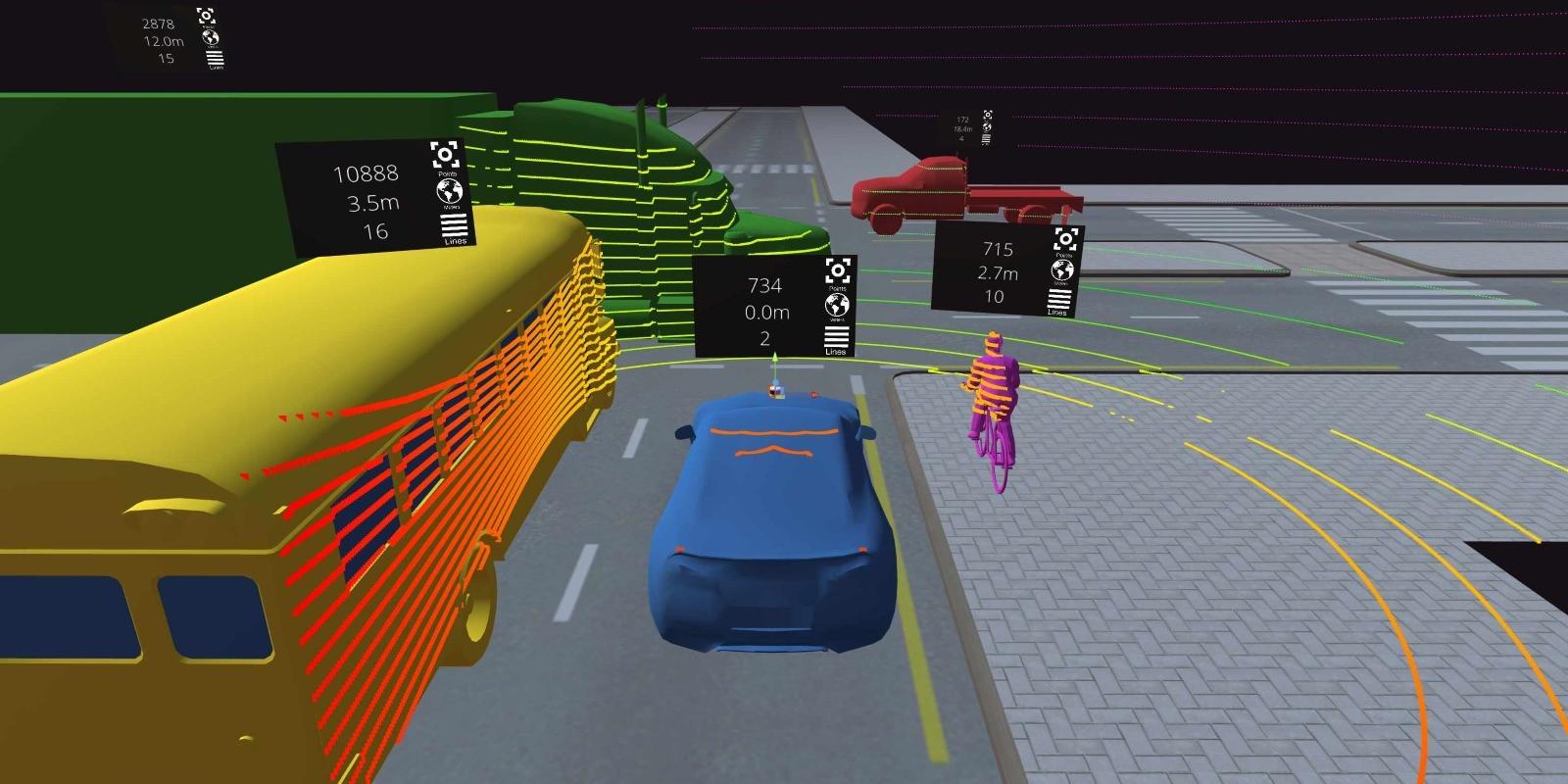
このような LIDAR シミュレーションに関する取り組みを踏まえて、近年ではレイトレーシングが使われるようになりました。リアルタイムレイトレーシングに関する最近の GPU テクノロジーにまつわるいくつかの利点が、LIDAR シミュレーションに数多くの刺激的な可能性を新たにもたらします。Unity の Sensor SDK、System Graph、および HD レンダーパイプライン(HDRP)を使用して、Velodyne Puck™を実際の仕様に基づいて、正確にシミュレートできるようになりました。この方法を使用すると、シミュレーション環境内のセンサーを現実のセンサーと同じように、DC モーターノード、可変 RPM(回転数)ノード、特定の波長のレーザー、および光検出器を使って構成することができます。その結果、以前は不可能だった、シミュレーション環境内でユーザーがある程度の制御と操作ができるセンサーが得られます。Unity の Sensor SDK フレームワーク内で、反射率、チャンネルノイズ、および RPM 変動を使用するシミュレーションが可能になりました。


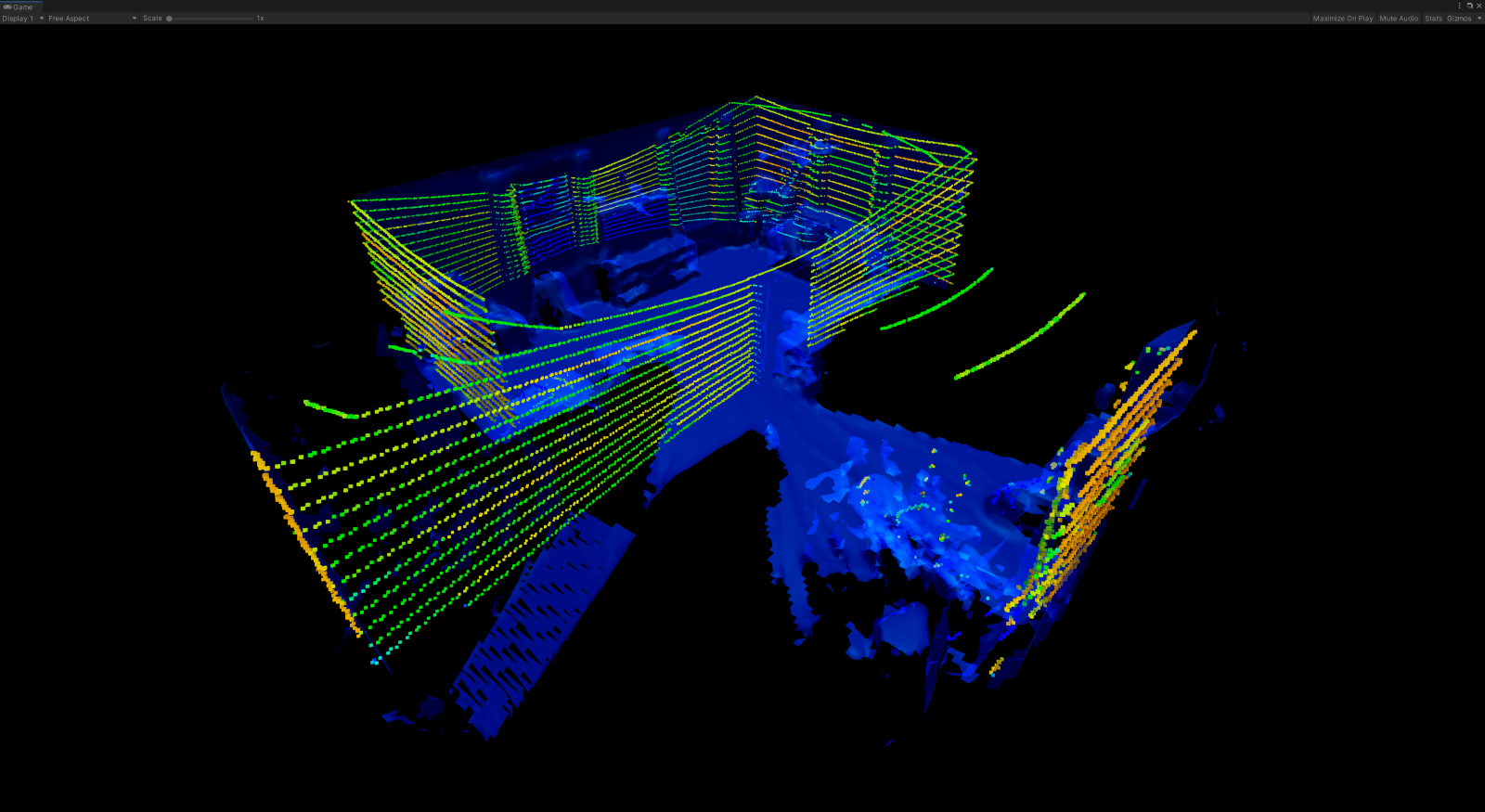
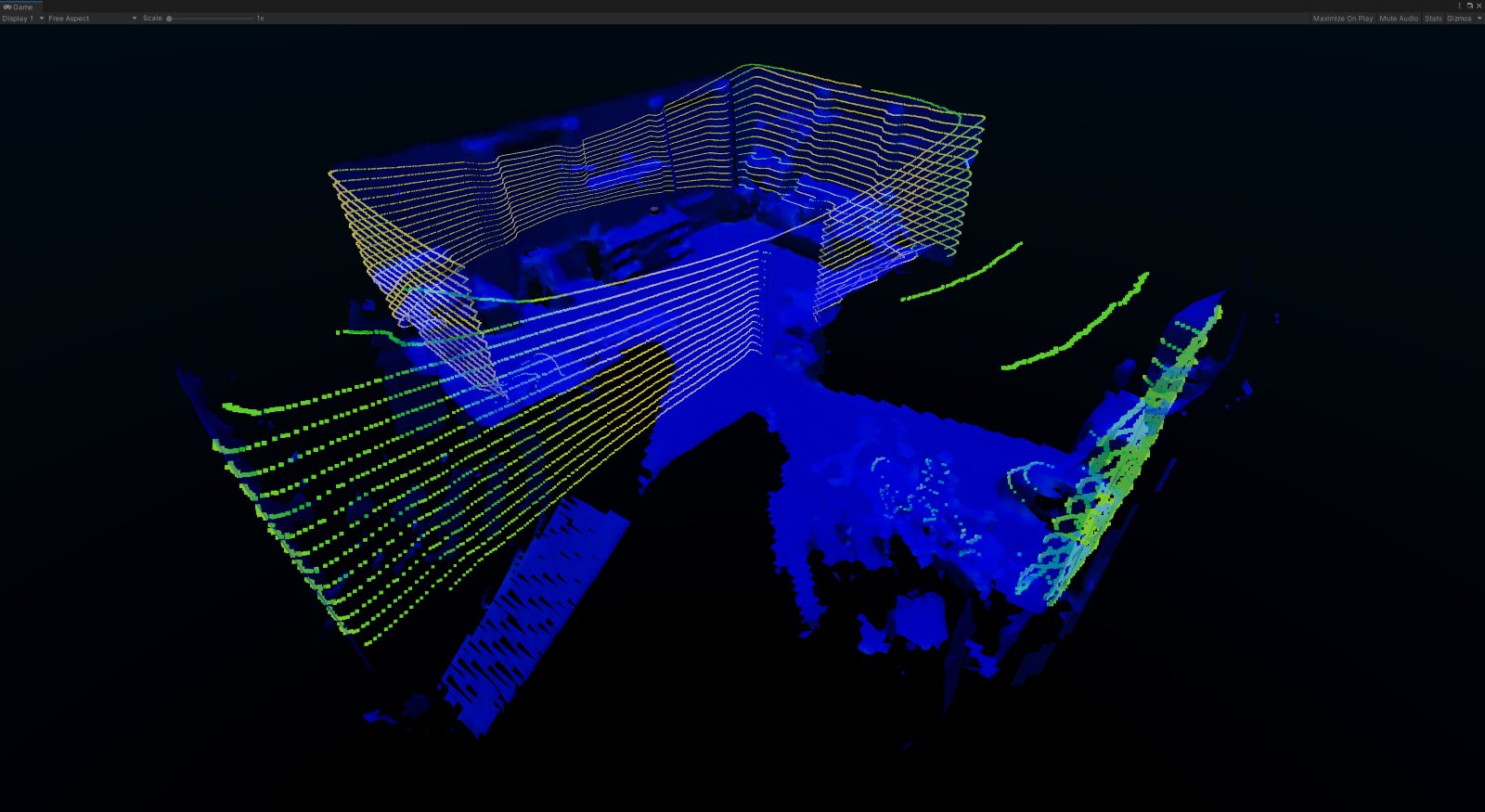
これらの初期のシミュレーションテストは、Unity の Sensor SDK と System Graph を使用して Velodyne Puck™センサーをシミュレートすることを目的としています。System Graph を非常に正確に調整すれば、実際の LIDAR データとほとんど区別できなくなります。これをテストするために、Velodyne Puck™を使用して現実世界のある場所を LIDAR でスキャンし、LIDAR データを Unity に取り込みました。これで、実際のデータをシミュレートされた点群と比較できます。この新しいほぼリアルタイムの LIDAR シミュレーションについて、これまで行ったテストでは、印象的な結果が得られました。

LIDAR シミュレーションは、刺激的なビジネスチャンスへの道を新たに開きます。本番環境で性能を詰める前に、現実世界での特定のシナリオを膨大な数並列させてシミュレートする機能は、現実の世界で同じことを試みるよりも、費用対効果が高く、単純で、高速です。Velodyne のエコシステムは、このシミュレーションプラットフォームなどの新しいテクノロジーを内包しつつ進化と成長を続けていきます。そのためこのエコシステムにあるものを活用することで、必然的にビジネスにおけるより良い提携関係や、より生産的なブレーンストーミング、および売上の向上が実現できます。このテクノロジーは、Velodyne のセンサーを顧客の手に渡し、顧客を前向きかつ重要な影響を与え続けることができる世界に導くためには、最優先で取り組んでいくべきものでしょう。
Sensor SDK と System Graph の詳細については、Unity のチームまでお問い合わせください。
Is this article helpful for you?
Thank you for your feedback!
- Copyright © 2024 Unity Technologies